Dropbox Plus から pCloud へ移行しようと思ったが不安定すぎてすぐに回帰した
タイトルの通りなんだけどそういうことがありました。
Extended file history を手放してソースネクスト3年に課金することにします(9年はちょいためらう)。ついでに 1pass も。ちょうど amazon co jp のセールで(keepaで見る限り)史上最安レベルの割引来てるのでポチりました。pCloud は買い切りかつ半額で買えたので無駄とまでは言わないけど…コールドバックアップ的な用途になると思う。
ググると pCloud 褒めてる人が多いけど、「これまで Dropbox Plus(以上)を仕事にも使ってた人」にはマジでおすすめできない。動作がもっさりだけならギリ我慢できるかなと思ったが、タスクトレイのアイコンがしょっちゅうグレーになって You are offline じゃないんだわ。ネットしてるんだわ。これはダメです。15年前の Sugarsync でもまだこれよりは良かった。アプリクラッシュは流石に不具合のようで、hotfix ぽいアプデも来ていたが、それを適用済みだったマシンでもたまに落ちてたので、根本的に不安定ぽい。仕事に使えるレベルではない…
Windows のライセンス認証ができないとき(MAKライセンス) → コマンドプロンプトで一度消す
前提
PCに完全にクリーンに Win 11 Education を入れて、起動したあとで、大学のボリュームライセンス(MAKというやつらしい)で設定アプリからアクティベーションしようとしたが、できない。何度試してもダメ。インターネットは全く問題なくつながっているのに。
Gemini に聞いたらコマンドで一度仮で入ってるライセンスを消したところうまくいったのでメモ。
手順
コマンドプロンプトの立ち上げ
- 管理者としてコマンドプロンプトを開く(スタート ->
CMDと入力 -> 右クリック -> 管理者として実行)。 slmgr /dliと入力してEnter.- 以下のコマンドを順番に実行する
以前のキーや汎用キーのアンインストール
slmgr /upk
(プロダクトキーが正常にアンインストールされたことを確認するダイアログが表示される)
MAKプロダクトキーの入力
slmgr /ipk XXXXX-XXXXX-XXXXX-XXXXX-XXXXXX
(キーが正常にインストールされたことを確認するダイアログが表示される)
即座にオンラインでのライセンス認証を強制実行
slmgr /ato
(最終的に 「プロダクトは正常にライセンス認証されました。」 と確認するダイアログが表示されるはず)
Word や OneNote で dictation のショートカット (shortcut, hotokey) を無効にする
一部の人しか関係ないかもしれないが…
自分は日本語IMEの英数入力ではなく言語自体を英語 (En) に切り替えたいことがよくある。半ばクセになっていてなんでだっけ?といわれたらパッと思い出せないくらいなんだが、使っている。日本語IMEのままで英数入力だとなんか不都合があったんだと思う。
それで、通常は問題ないのだが、Wordのときだけは、以下の問題がある:
- 日本語のとき: Alt + ` で「英数入力↔日本語入力」の変更トグル
- 英語のとき: Alt + ` を押すと、Word の Dictation 機能が起動してしまう
もちろん後者が問題。
で、これをずっとなんとかしたかったのだけれど、以下のレジストリを追加することで解決した:
消えるのが怖いので自分でもメモしておくと、場所は
- Word:
HKEY_CURRENT_USER\SOFTWARE\Policies\Microsoft\office\16.0\word\disabledshortcutkeyslist - OneNote:
HKEY_CURRENT_USER\SOFTWARE\Policies\Microsoft\office\16.0\onenote\disabledshortcutkeyslist
で、なければ自分で key を作っていく。このとき、case insensitive なので適当にキャメルケースとかにしてOK. disabledshortcutkeyslist は長くて typo しやすいので(実際していた)コピペした方がよい。
作ったら右のペインを右クリックして、文字列 (String) key を作成し、KeyMod1 という名前をつける。ダブルクリックして、値を 192,16 とする(192が Alt で 16 が ` だったか、その逆か)。
あとは Word や OneNote が開いていたら全部閉じて、もう一度開く。
「自動車事故による自然選択でツバメの翼が短くなった」は本当か
背景
深野祐也さんという生態学者が『都市で起きる進化(前編)』という記事を書いていた:
この中で、自動車事故による自然選択でツバメの翼が短くなった可能性についての話がある。
それに対して僕はこうブコメした:
都市で起きる進化(前編) | なぜ人は自然を守りたいのか? | 深野祐也 | WEBみすず
- [evolution]
- [あとで読む]
翼長の話は専門に近いので知ってたが違いといっても最頻値で108 mm と 110 mmみたいな差なのよね。長さ以外の形質・性能も合わせて評価しないと、これだけで断定するには小さすぎる差のような気がする
2025/08/05 17:15
このエントリでは、この話についてもう少し elaborate したい*1。
前提
特に関連する部分を一部抜粋する:
死んだツバメとツバメ全体の性質とを比較すると、死んだツバメは翼が長いことがわかりました。そして、その翼長の違いは、年が経つにつれどんどん大きくなっていました。翼長は、ツバメが飛行する際の小回りに影響するそうです。そのためこの比較の結果からは、小回りの利かない長い翼の個体は事故にあいやすく死んでいく一方、短い翼の個体は生き延びやすく、その形質が遺伝して時間が経つにつれ集団全体の翼が短くなっていった、と考えることができます。このツバメが高速道路のすぐそばで巣を作るようになったのは、1980年代からだそうです。この研究が行われたのは2013年のことですから、高々30年で適応進化が起きたことになります。ツバメの翼と飛び方が、自動車事故という全く新しい自然選択によって急速に進化したのです。
そしてこの情報の出典としては次の論文が挙げられている: - Charles R. Brown, Mary Bomberger Brown, “Where has all the road kill gone?” Current Biology 23(6) R233-R234(2013)
ところでまず、この論文では『飛び方』は全く調べていない。推測しているだけである。鳥のパラメタとして計測しているのは博物館標本の翼の長さ wing length の他には性別と相対年齢(足輪装着後の経過年数)だけのようである。計測は成長が止まっているであろう成鳥に限っている。なお、鳥類学用語の wing length はバイオメカニクス業界のそれとは異なり、「肩関節から翼端までの長さ」ではない。翼は畳んだ状態で計測するがそれにも3種類のバリエーションがあるらしく、ややこしい。本論文ではサプリによると "distance from the writs joint to the longest (un-flattened) primary"(手首関節から最も遠い初列風切先端までを、翼を潰さずに計測)とのこと。
疑問
さて、論文で統制・考慮済みのパラメタ *2 のほかに、「結果に影響する可能性のあるパラメタ(環境や形質など)はどれほど調べたのか?」という点が当然の疑問として出てくる。たとえば、どれほど効くかはいったん置いておくとして、少し広い視点で考えるならば、当地の気温・気圧・空気密度なんかも入ってくるだろう(30年間で平均気温は上昇しているのでは?)。鳥の形質のうち飛行に関連しそうなものでは、まずは静的なパラメタとして、体重や翼面積(これらから算出される翼面荷重)、翼のアスペクト比 *3 やテーパ比 *4、尾翼のサイズや形態、などがあるだろう。翼の(自然状態での・滑空状態での)キャンバ *5 やねじりも関係しうる。個々の羽根(とくに初列風切・次列風切)の形態や材料物性(したがって曲げ剛性やねじり剛性)はどうだろうか。さらに、羽ばたき・飛行力学・制御という観点も重要とすると、動的なパラメタとしては、羽ばたき運動(羽ばたき周波数・羽ばたき振幅やもっと細かな羽ばたき運動)や行動の変化もありえるだろう。これらの動的な要因は当然翼形態などとも関連するが、ほかに脳や筋骨格系の変容や、学習とも関連する可能性がある。実際に論文にも冒頭付近に "we might expect natural selection to favor individuals that either learn to avoid cars or that have other traits making them less likely to collide with vehicles." という記述がある。
ここまで色々と関連しそうなパラメタを挙げたけれど、「いやいや、それらも変わったかもしれないけど、翼の長さというパラメタが明確に・際立って違っていたのでしょう?」と思うかもしれない。確かにそうなのかもしれない。では実際にどれくらい異なっていたのだろうか。
論文に示されている翼の長さ
まずは記事中で出典として挙げられていた Brown & Brown, 2013 のデータを見に行こう。Fig. 1B & 1C にまとまっている。
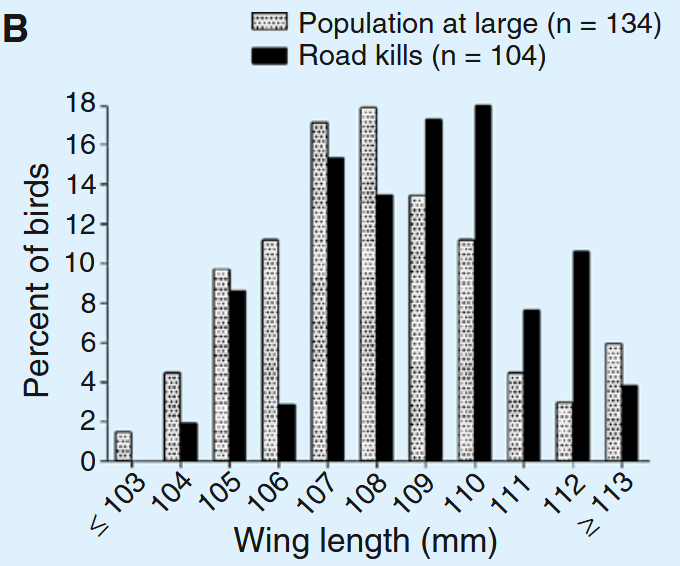
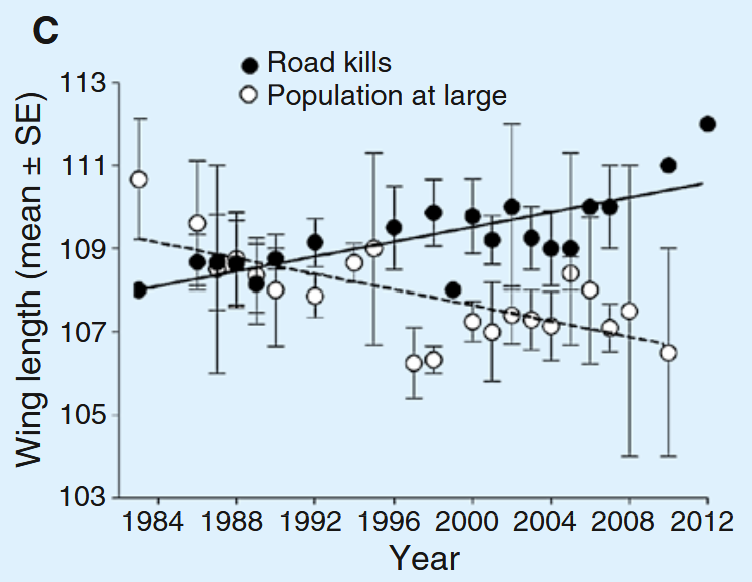
というわけで、確かに 傾向(トレンド)としてはロードキル個体の方が全体に翼は少し長いし、年を追うごとに一般的な死亡個体とロードキル個体の翼の長さの差は開いている。
しかし、かなりのオーバーラップがあり、2群の峰が明確に分離しているなぁ、という感じではない。また、違いの大きさはどれほどかというと、平均値が最も開いている2012年でだいたい106 mm対110 mmといったところである。約4%の差。これをどう考えるか、ということになる。個人的には、上記で示された他の可能性を全く調査していない状態で、翼の長さのみの4%程度の違いだけから結論に飛びつくのはかなり危ういのではないか、と考える。ロードキル個体になにかあるというのは本当かもしれないが、翼長だけで議論するのは乱暴すぎるのではないか、というのが自分の印象だ*6。
論文の論理
論文では翼の長さと事故の関係を以下のような論理で関連付けようとしている:
One possible explanation is that selection has favored individuals whose wing morphology allows for better escape. Longer wings have lower wing loading and do not allow as vertical a take-off as shorter, more rounded wings [7]. Thus, individuals sitting on a road, as cliff swallows often do, who are able to fly upward more vertically may be better able to avoid or more effectively pivot away from an oncoming vehicle [8].
7. Swaddle, J.P., and Lockwood, R. (2003). Wingtip shape and flight performance in the European starling Sturnus vulgaris. Ibis 145, 457–464.
仮に出典7で論じているらしい "lower wing loading" "do not allow as vertical a take-off"(低翼面荷重の翼は…より垂直に近い離陸がしづらくなる)を認めたとしよう *7。しかし "Longer wings have lower wing loading and..." は怪しい。
そもそも翼面荷重 wing loading とはなにかというと、体重を翼面積 *8 で割った値である。したがってふつうは体重と翼面積を測って初めて算出できる。しかしこの論文ではサプリまで読んでも計測したのは wing length(翼の長さ)のみである。体重も翼面積も計測していない。というか計測しているなら Figure 1 には wing length ではなく wing loading をプロットしていただろう。では isometric scaling を考えているのか?というと、そうでもない。どういうことか。
isometric scaling とは「生物の大小が相似的に変化している」という想定である。たとえば体長が2倍違うなら、翼面積は2の2乗で4倍、体重は2の3乗で8倍違うはず、という考えだ。したがって、もし isometric scaling を想定しているのなら、今回、翼面積の倍率は、長さ倍率1.04の2乗、体重は同じく3乗だから、翼面荷重は 1.043/1.042 = 1.04 倍ほど…つまり翼が長い個体の方が4%ほど「大きくなる」はずなのだ。しかし論文には "longer wings have lower wing loading(長い翼の翼面荷重が低い)" とある。つまり isometric scaling では「ない」という想定を(暗黙に)している。たとえば「体重が変わらずに翼が長くなる(しかも平均翼弦長も減らず、翼面積は大きくなる)」といったようなことかもしれない。しかしこのことは論文に陽に書いていないし、裏付けとなるデータもない。
たとえば、翼は「長くなったが、そのぶん翼弦長が小さく(細長く)なっていて、翼面積はむしろ減っている」という可能性もゼロではないだろう。翼長が15%とか20%も変わっていて、翼弦長については特に書いていないなら「まぁ翼全体が大きくなっているのかな」といえなくもないが *9、「翼長が4%長いです。他には何も計測してませんし isometric scalilng も仮定してませんが、なぜか翼面荷重は低くなるはずです」と言われても、「えぇ…?」と困惑するしかない。
つまり他のパラメタを持ち出すまでもなく、ちょっと苦しいのではないか。
論文で論じられている他の可能性
論文では一応他の可能性も論じられている:
severe weather events that caused slection on body morphology and changes in insect prey may also be responsible [9]
9. Brown, M.B., and Brown, C.R. (2011). Intense natural selection on morphology of cliff swallows (Petrochelidon pyrrhonota) a decade later: did the population move between adaptive peaks? Auk 128, 69–77.
ということで天候(気候)が挙げられている。また学習についても再度触れられており可能性はあるとしている(ただし、成長に伴う学習が強いなら若鳥ほどよく死ぬはずだがそういう傾向はない、ともある)。
したがって当然というか論文では色々考えてはいる。いるのだが、生態学者(行動学者?)の視点であり、バイオメカニクス屋ではないので…ということだろうか。
なぜ他のパラメタを計測しないのか?
まずこの論文では博物館標本を対象としているので、体重は難しいだろう。ではなぜ死体を拾った際に体重を計測しないのか、というのは、自分よりもフィールドワーカの鳥研究者の方が詳しいと思う。たとえば体重は死亡個体を見つけた時点で生前からだいぶ変化している可能性が高いとか、計測は手間であり計測項目に入っていなかったからデータがない、といった感じだろうか。
翼面積については、これも計測項目に入っていない(体重より更に面倒)ということがあるだろう。だから普通はせいぜい isometric scaling と仮定すると思うのだが…。博物館標本から計測できないのか、というと、保存状態によってはできるものもあったかもしれないが、手間はだいぶ大きくなるだろう。
また、そもそも適切な翼面積とはなにか?という問題もある。仮に生きている個体を捕獲したとしても、どれくらい翼を広げた状態を翼面積とすべきだろうか?ということである。たとえば翼を切り取ったり剥製を風洞実験しようという場合、その開き具合や細かな姿勢はどのように決めるべきだろうか?残念ながら、この重要な問題についてキチンと書いてある論文を見たことがない。
たとえば次の画像は小翼羽 (alula) の機能について広く知らしめるきっかけとなった有名な論文 (Lee et al., 2015*10 のサプリ figで、実験の様子を示したものだが…
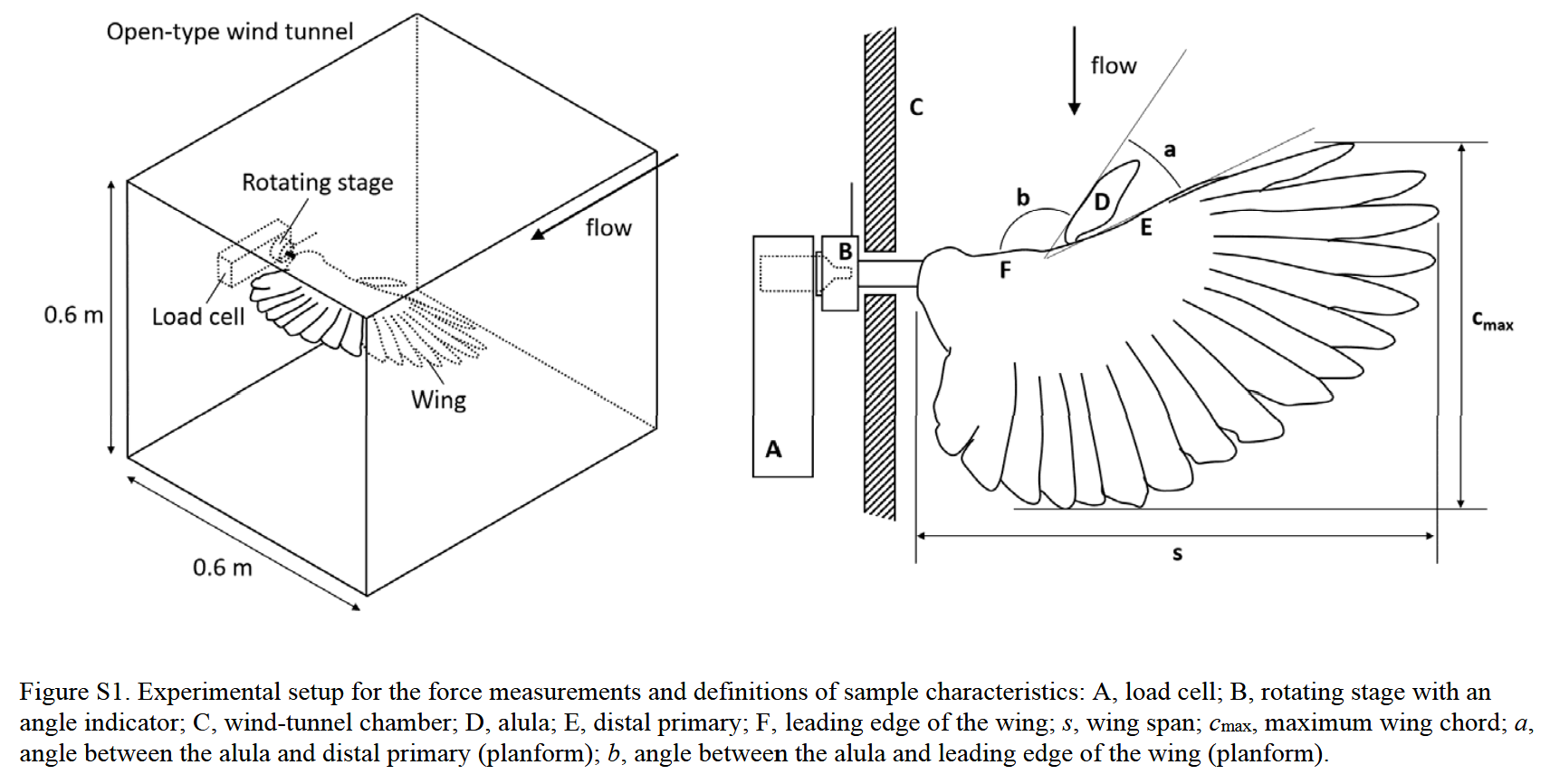
この翼の開き方などの形状や姿勢 *11 をどうやって決めたのかは書いていない。また肝心の小翼羽の角度についてもこの図にある a や b という平面的な(と思われる)開き角しか書いておらず、明らかに自由度が足りていない。たとえば想像してほしいが、a = 0 のままで小翼羽の先端が翼面から離れる方向に立体的に「開く」ことは可能だろう(上反角的な方向)し、実際の鳥の写真・動画を見てもこの方向の自由度はあることはほとんど明らかなのだが、その記述が(可能性すら)書いていない。小翼羽論文なのにこの話が一切ないのは個人的にだいぶ衝撃的だった。
他にも鳥の翼を風洞実験するとかモータで回転させるといった論文はそこそこあるが、このあたりの記述はよくて曖昧、というところに思える *12 *13。
一つのアイディアは「なるべく飛んでいるときに近い翼形状・翼姿勢・翼面積とすべき」ということだろう。しかしこれも、そんなに簡単な話ではない。
- まず、飛行状態の翼形状・翼面積を計測した事例は現代でも非常に少ない。自分たちの論文 *14*15 はそのような数少ない例ではあるが、要するに、実際かなり大変で、データは少ない
- また、鳥は飛行中に翼形状を変えられるし変えてしまう。計測された wing length が長い個体が、飛行中の翼の広げ方(より一般には周波数なども含めた羽ばたき運動)を短い個体と同一にしている保証は、ない。いや、おそらく、羽ばたき運動もけっこう/かなり似ているのだろう。しかし、長さがたった4%違うだけなら、羽ばたき運動(たとえば羽ばたきの結果としての迎え角)のわずかな調整で容易に覆しうる…というのは羽ばたき飛行をやっている研究者なら容易に想像できる範疇でもある。
若干尻切れだが大体言いたいことは書いた気がするのでここでおしまい。
Futher reading
本当は少なくとも Swaddle 論文(未読)は読んで「翼面荷重と離陸性能って実際どうなのよ」とか、Ray et al. のショウジョウバエの翅の平面形を RNAi でいじったときの機動性計測の論文とかの話もすべきだが(こっちは既読)、力尽きたので情報だけ置いときますね
- Lockwood, R., Swaddle, J.P., Rayner, J.M.V., 1998. Avian Wingtip Shape Reconsidered: Wingtip Shape Indices and Morphological Adaptations to Migration. Journal of Avian Biology 29, 273–292. https://doi.org/10.2307/3677110
- Swaddle, J.P., Lockwood, R., 2003. Wingtip shape and flight performance in the European Starling Sturnus vulgaris. Ibis 145, 457–464. https://doi.org/10.1046/j.1474-919X.2003.00189.x
- Ray, R.P., Nakata, T., Henningsson, P., Bomphrey, R.J., 2016. Enhanced flight performance by genetic manipulation of wing shape in Drosophila. Nature Communications 7, 10851. https://doi.org/10.1038/ncomms10851
おまけ: はてなブログで数式が全然書けない問題
はてなブログで数式を書こうとするといつも失敗する。理由はエスケープ不足であり、下記の素晴らしいブログエントリを毎回検索して見つけて解決している気がする:
万が一上のページが消滅するともう二度と書けなくなりそうなので要点だけメモさせてほしい…
[]は\\ で二重にエスケープ_は \ でエスケープ^は\でエスケープするか、次の文字を{}で囲む
*1:人はなぜ科研費申請書等のすべきことが目の前にあるとつい部屋を掃除したりブログを書いたりしたくなるのか…
*2:力尽きたので気になる人は元論文読んでください…。たとえば自動車のサイズはむしろ大きくなっていて、交通量も不変か増えてるくらいなのに、全体の死亡率は低下している、というような話はある。
*3:翼(の平面形)がどれだけ細長いかの指標。仮に翼の長さが , 幅(翼弦長)が
の長方形(矩形)翼であれば単純に
だが、一般の形状であれば翼面積(上から見た投影面積)を
として
で計算されうる。「うる」と書いたのはふつう飛行機であれば左右両翼+胴体部分を含んで考えるためで、鳥や昆虫のように翼・翅を1枚で考える場合には確実に通じる定義があるとは言い切れず、毎回確認が必要であるから。飛行機のときは両翼端を結んだ長さ(翼幅)を
として
とする。
*4:翼の付け根から先端へ向かうにつれてどれだけ先細になるかの指標。
*5:ざっくり言うとどれだけ上に凸かの指標。
*6:飛行バイオメカニクス業界的なザックリとした感覚では、たとえば2つの形状の揚力の違いを調べましたよ、みたいなときに、10-15%程度以上の差がない場合には結果の検討にはかなり慎重になることが多い。
*7:まだ読んでないが Swaddle は見たことのある名前なのでバイオメカニクス屋っぽい。
*8:ざっくりいうと翼を広げたときに上から見た投影面積。飛行機のの場合は両翼に加えて胴体部分もいいかんじに含める。鳥の場合は後述するように翼の広げ具合をどうやって決めるのかという問題もある。
*9:いや、サイエンスとしてはダメだと思うが。陽に計測すべきだし記述すべきだが。
*10:Lee, S., Kim, J., Park, H., Jabłoński, P.G., Choi, H., 2015. The Function of the Alula in Avian Flight. Scientific Reports 5, 9914. https://doi.org/10.1038/srep09914
*11:剛体だと近似しても、3つの角度の自由度がある。風洞実験で空気力学的に効くのはこのうち2つだが…。
*12:もちろん Lentink et al., 2007 のような後退角が主眼の論文だったりするとちゃんと書いてあるが… Lentink, D., Muller, U.K., Stamhuis, E.J., de Kat, R., van Gestel, W., Veldhuis, L.L.M., Henningsson, P., Hedenström, A., Videler, J.J., van Leeuwen, J.L., 2007. How swifts control their glide performance with morphing wings. Nature 446, 1082–1085. https://doi.org/10.1038/nature05733
*13:一方、昆虫の翅の場合はもう少しシンプルなので、そこまで疑問が持たれることはなさそうだが、やはり前進角・後退角をどう決めているのかは怪しいことが多いように思う。
*14:Maeda, M., Nakata, T., Kitamura, I., Tanaka, H., Liu, H., 2017. Quantifying the dynamic wing morphing of hovering hummingbird. Royal Society Open Science 4, 170307. https://doi.org/10.1098/rsos.170307
*15:Cheney, J.A., Stevenson, J.P.J., Durston, N.E., Maeda, M., Song, J., Megson-Smith, D.A., Windsor, S.P., Usherwood, J.R., Bomphrey, R.J., 2021. Raptor wing morphing with flight speed. Journal of The Royal Society Interface 18, 20210349. https://doi.org/10.1098/rsif.2021.0349
Noto Sans JP(などの variable font?)を使ったパワポスライドなどがPDFにうまく印刷できない問題
環境
Windows 10 Pro
現象
Adobe で印刷しようが Microsoft PDF printer で変換しようがなにをやっても望み通りの Noto Sans JP (Regular) にならない。
ただしなぜか Noto Sans JP (Thin) にはなることがあるし、Adobe で埋め込もうとするフォントのリストを見てもなぜか Noto Sans JP (Thin) だけが見えていたりする。
対策
variable font を諦めて、static fonts をすべてインストールしたらいける(ことがある)と思われる。
いったん今はいっている Noto Sans JP をアンインストール → 再起動 → 再インストール(ここで NotoSansJP-VariableFont_wght.ttf ではなく、static フォルダ内の全てのフォントをインストール)→ 再起動
としたら直った。
実際、アンインストール前には Windows の設定アプリの「フォント」には7つのフォントフェイスがあるとあったのに、この再インストールをしたら9つになっている。
しかも、いずれの場合でも詳細を開くとデフォルト状態で選ばれているフォントフェイスは「Thin」なのである…
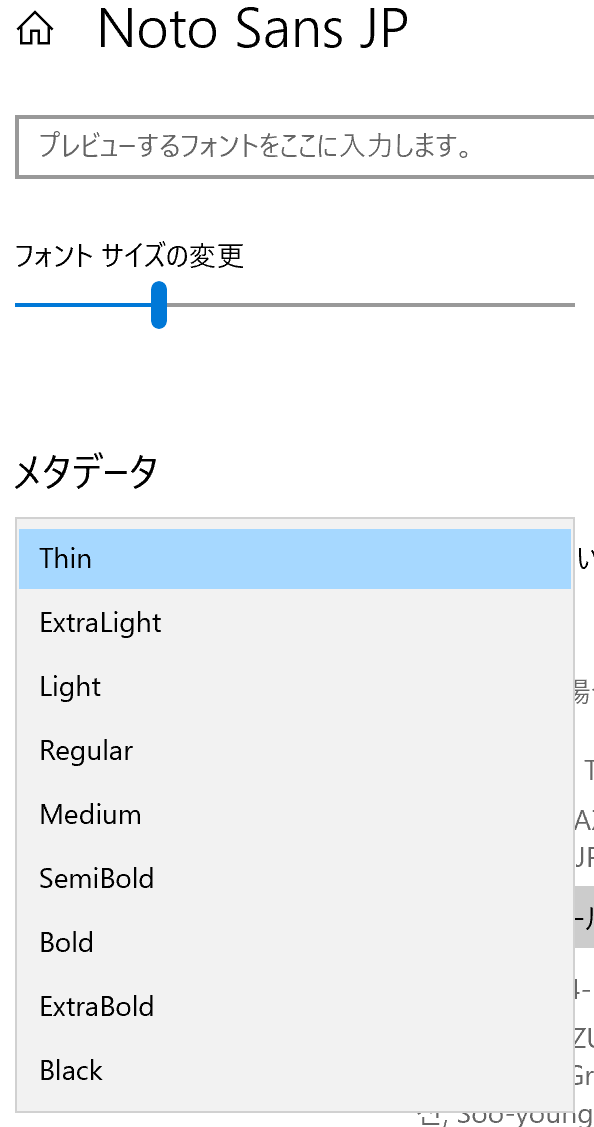
ということは、推測だが、variable の場合は Thin しか認識されなかったのではないだろうか。
そして Noto Sans JP は Regular 以外のフォントフェイスを Bold などにするとPDF化したとき文字化けする(はず)ので、いろいろな人が困っている…のではないだろうか。
FAQ
いまのフォントを消そうとしたが、システムフォントだから消せないと言われたが?
regedit で消すしかないっぽい。ここなどに方法がある:
念のためメモしておく。
まず
HKEY_LOCAL_MACHINE \ SOFTWARE \ Microsoft \ Windows NT \ CurrentVersion \ Fonts
にあるはずなので、消す。ここにあるのは NotoSansJP-VF.ttf という名前の variable font ぽい。
あと、
HKEY_LOCAL_MACHINE \ SOFTWARE \ Wow6432Node \ Microsoft \ Windows NT \ CurrentVersion \ Fonts
にもあることがあるらしい(自分はなかった)。
[2025-06-19追記] また、自分の場合は、とあるPCにおいては、
HKEY_どれかわすれた \ このへんにすごい長い数値 \ Microsoft \ Windows NT \ CurrentVersion \ Fonts (だったかな)
や
HKEY_CURRENT_USER \ SOFTWARE \ Microsoft \ Windows NT \ CurrentVersion \ Fonts (これは確実)
にもあった。ユーザの固有の場所?みたいな?これらはバラバラだったので、おそらくはまさに static をインストールした結果なのだと思うのだが(だから消さなくてよかったのかも)だが、いちどクリーンにしたかったので消した。
これらは Edit > Find から Noto Sans などを検索すると容易に見つけられる(tick は Value のみにいれる)。
[2025-06-19追記おわり]
消したらPC自体を再起動すべき。
PDF 化するときに印刷からが良いとか Export がいいとか Save as がいいとか Microsoft Print to PDF がいいとか Adobe がいいとかあるが?
正直どれがベストか自分もわかってません。色々試してうまくいったやつを使ってるが、マシンが変わると変わってる気もする(Adobe Acrobat Pro が入ってなかったりするし)。いまこの瞬間は(パワポの場合) Adobe タブの Create PDF だとダメ。Print > Microsoft Print to PDF と Export > Create PDF/XPS Document と Save as で形式を PDF にするやつはいける(この3つは同じなのか??)
poetry 作業環境設定メモ(未完)
前提
恥ずかしながら結局うまくいかないし今すぐ jupyter notebook 使えないとまずいので poetry いったん halt する。
基本
基本的には以下の pyenv(実際は使わんが)+ poetry の Windows のとこを見てやる。
https://qiita.com/c60evaporator/items/b6a7394231d1e768ce64#2pyenv--poetry
トラブルシューティング
Python was not found
なぜか python が見つからないみたいな以下のエラーが頻発する:
Python was not found; run without arguments to install from the Microsoft Store, or disable this shortcut from Settings > Manage App Execution Aliases.
どうやらこれは
にあるように、Manage App Execution Aliases というWindowsの設定で
- App Installer:
python.exe - App Installer:
python3.exe
となっている2つをOFFにすると解消された(ようだ)。
当初はこれが poetry の仮想環境と関係あるのかと思っていたが、関係なさそう。
「Poetryで仮想環境作成」のところ
よく見ると書いてあるのだがちょっと分かりづらいので…
たとえばユーザが maz で、python のバージョンが 3.13 なら、
> poetry env use C:\Users\maz\AppData\Local\Programs\Python\Python313\python.exe
とする。
poetry shell ができない
記事にある通り、仮想環境の起動をしようと
> poetry shell
してみると、
The command "shell" does not exist.
という赤字のエラーが出てしまう。
poetryをアップデートしたら、poetry shellコマンドが使えない
を見ると、こうすればいいようだ:
> poetry self add poetry-plugin-shell
これで使えるようになるので、
> poetry shell
で起動できた。
「④エディタに仮想環境を紐付ける」のところ
新規に test.py を作って右下の python をクリックしても仮想環境のpythonてのが出てこない。
※作成した仮想環境がリストに見当たらない場合、Enter interpreter pathをクリックして仮想環境フォルダ内のpython.exeのパスを指定します
とはどういうことかというと、Enter interpreter path の後で、さっきの poetry env use C:\Users\maz\AppData\Local\Programs\Python\Python313\python.exe したときと同じ、まさにこのパスを指定するということ。C:\Users\maz\AppData\Local\Programs\Python\Python313\python.exe ってことね。長いんだけど。めんどいんだけど。まじでこれが正解のやり方なのかだいぶ疑問ではある…
パッケージの追加
仮想環境に入った状態で
> poetry add matplotlib
とかしていく感じ。一括指定が早くて
> poetry add matplotlib pandas seaborn jupyter
とか。
ファイル(物理)の検討
まとめ
前提として、紙自体にパンチ穴を一切開けずにすべてA4のホルダーに収納したい。サイズはA4タテで、ホルダーは位置を入れ替えられるように穴開きリフィルであること。
いろいろ試したが、結局は、 - 穴は4穴 - 金具はチューブファイルまたはO型リング - リフィルは主にマチ・フタ無しの通常厚さ(説明書等はマチ・フタ付き) となりそうだ。
具体的には、本体はチューブファイルなら「KOKUYO フ-L684NB」、O型リングなら「KOKUYO フ-TLF444BZ」で、リフィルは主に「PLUS 87-700」となりそう。
ただし入手性などの点から中身が軽いことが確定しているケース(=レシート)については2穴も併用するかもしれない。というか既に買ってしまったので有効活用しなきゃ、というのもある…
一般的な仕様や性能の話
穴数について
(日本の)市場に出回っているファイルの殆どは2穴。しかしこれは紙自体をパンチしてファイリングするにはいいのだが、リフィルを使う場合にはファイルの中身が少し重たい(正確にはトルクが大きい)とすぐにリフィルがクシャッとなってしまう。対策としては極厚リフィルやマチ付きのような剛性の高いリフィルを使う(割高)か、4穴以上の本体を使うか。4穴の他に30穴(以上)もあるがここまでいくと主にいわゆるルーズリーフ用のようだ。
4穴をメインにしようと思うが、欠点としてはまず種類が少ないこと。コストもややかかる。2穴専用リフィルを使い回せないことも欠点(ただし2・4・30穴全てに使えるリフィルはよくある)。特に4穴かつ厚いチューブファイルは選択肢が非常に少なく、ほぼKOKUYO フ-L684NB一択かもしれない(色も青のみ)。それと4穴の明確な欠点はリフィル(紙もだろう)の出し入れがスムースでないこと。特にリフィルを金具に差し入れるときに、3穴までは入っても最後の1穴が入りづらい。しかしこれは4穴を選んだ以上避けようがなくしょうがないのだろう。
金具について
穴数と別に金具について。まずチューブファイルとリングに大別される。
チューブファイル
チューブファイルには片側からのみ開けられるタイプと、両側から開けられるタイプがある。おそらくキングジム (KING JIM) とコクヨ (KOKUYO) の寡占に近い状態と思われる。
会社ではおそらくキングジムの方がシェアが高そうなイメージ。少なくとも自分が昔バイトしてたところはでキングジムのファイルだった。どっちでも変わらないだろうと思っていたのだが、今回初めてコクヨを買ってわかったのは金具のセット&リリースの仕方がかなり違うということ。キングジムでは可動側の金具を背表紙側の金具にはめ込むようにすると自動的にカチッとハマる。中身を入れたいときの金具リリースも可動側の金具を軽く押し下げるだけでよい。
一方、コクヨは2穴の両側開けタイプのNEOSでは背表紙金具のかなり背表紙に近い位置を横から押すことでリリースする。正直かなり押しづらい。4穴チューブファイルでは金具の下の方にあるレバーを上に押し込む。これは慣れれば押しやすいかもしれないが若干力がいるのと、そもそも忘れる。さらにリングになるがOリング4穴のファイルでは上に付いているレバーを押し上げる、とこれも方式が違う。統一していればいいだろうが混在環境では非常に混乱する。
バイトではファイルの追加作業は多くても1日に数回程度しかやらなかったが、キングジムの作動方式に慣れていたようで、コクヨのチューブファイルは(見た目は似てるのに)方式が全く違うために毎回「えっと…」となる。
リング
チューブファイルと違って金具が外れない(左型と右側に分かれるがどちらも背表紙にくっついたまま)ので、リングの方が頻繁な差し替えに向いている、かもしれない。ただしファイルの最大厚さは明確に薄く、1000枚みたいな大量のファイリングはできない。
大きくO型とD型があるようだ。どちらかというとD型の方が種類が豊富で普及してそうなので、なんとなく買ってみたら罠だった。ものすごくめくりづらい。正直、欠陥商品では??というくらいにやりづらい。なんでこんなに普及してるのか謎。紙やリフィルの右端が揃う?だから何?めくることがまずない、という用途ならともかく、めくる可能性がそこそこあるならO型一択だろう…。しかしなぜかO型は少ない。謎。
リフィルのフタ
キングジムはどうもフタを手前側(左側)に統一しているようで、以下のレビューでも同様の指摘がある:
フタの部分ですが、向きが逆では?と開封した時驚きました。
ですよねぇ…。なので他の部分の性能・品質がよくても買う気がしなくなってしまった。
ところが一方で、KOKUYO の方向に違和感があるという人もいるようだ(おそらく、先にキングジムを使っていたのだろう):
既に使っていた物は裏側に向かって蓋部分が折れて閉まるのに、これは手前側。初めて使う場合や慣れればいいのでしょうが、私は使いにくいです。
要するに単なる慣れなのかもしれない…?
レビュー:ファイル本体
2穴
違いは色と本体の厚さだけ。NEOS は両開きかつ奥行きが長いのと見た目もかっこいいなと思ったのだが、金具が使いづらいのと、そもそも2穴なので自分としては適切な選択ではないかなと判断してこれ以上ほかの製品は試していない。じゃあなんで2つも買ったんだよというと、最初は2穴で問題ないと思ったので「あとは厚さのサイズ感と色だけ試せばいいっしょ」と思っていたため…。甘すぎた。
4穴
KOKUYO フ-L684NB(チューブファイル)
最終候補の一つ。 4穴かつチューブファイルで厚いというのは選択肢が少ない。これはキャパシティが800枚と背表紙が最も厚いと思われるタイプ。しかし色が青しかない。
KOKUYO フ-TLF444BZ(O型リング)
最終候補の一つ。 4穴かつO型リングでそこそこ厚いというのは選択肢が少ない。これは300枚とリングにしては多い方。色は青と緑しかない。でも2色あるだけいいし、チューブファイルみたいに #0000FF みたいな色ではないので良い。緑が欲しかったけど高かったか在庫切れかなんかで青にしてみた。上のレバーを上に押すという方式がやや独特だが、いちおうリング自体をつかんで左右に開閉もできる(閉じてもロックはかかってない状態になる)。まだほとんど使ってないのに、いま見たら上から3番目のリングに2 mmくらいの隙間が…うーむ。こういうのが嫌な人は素直にチューブファイルの方がいいのかも。
リヒトラブ AJG1280-0(D型リング)
試したが微妙。 4穴かつD型リング。見た目はきれいなのだがD型リングがダメだった。めくりづらいのが最悪なのだが、リフィルの出し入れもやりづらい。あとは背表紙の下面側に4箇所穴が空いていて、リングがそこにはまり込む形になっているのは賛否が分かれるかも。D型リングのめくりづらさに比べると誤差だが…。
(30穴) maruman F949R-01
30穴を1回も試さないのもなんだな、と思ったので買ってみた。 予想通りではあるが、30も穴があると通しづらい。思ったほどではないものの、抜き差しは基本的にしない想定と思ったほうがいいだろうな…
レビュー:リフィル
フタ付き
(2穴)KING JIM キングホルダー 封筒タイプ A4-2穴 フタ・マチ付き No. 782-10
試したが微妙。 フタが手前側に付いている。何らかの明確な思想に基づくのだろうが自分には合わなかった。色が5色あったり100枚パックがあるのは良さそう。
(2穴)KOKUYO ファイリングホルダー 2穴・マチ付きエンベロープ 10枚パック フ-GHE750T
2穴ならこちらの方が良い。 上記キングジムとほぼ同じ使用感だが、フタが奥側に付いている。
(4穴)KOKUYO 取扱説明書ファイル替紙 封筒型(マチ付き) A4-S 2穴・4穴用 5枚入り ラ-YT870
4穴でとりあえず試してみた。やはりフタは奥側に付いている。悪くはない。もちろん2穴にも使える。しかし5枚入りと少ないので割高に感じる。
(30穴) KOKUYO ラ-A35 封筒型(マチ付き)10枚
厚さは 0.15 mm とかなり厚い。まだ買ったばかり。
フタなし
(2穴専用)KOKUYO クリヤーポケット 中厚口 50枚 ラ-AH216-5
モノは別に悪くないのだが2穴専用を買ってしまったのが失敗だった。
(2穴専用)KOKUYO クリヤーポケット 特厚口 20枚 ラ-AH2112-2
2穴専用だが特厚口 0.18 mm で剛性が高い。まだ買ったばかりだがありかも。
ところでコクヨのリフィルには「薄い 0.04 | 0.06 | 0.08 | 0.12 | 0.18 厚い」というレジェンドがある。0.04 mmや0.12 mmは現在の市場には見当たらないが昔はあったのだろうか…?と思ったらちょっと違う形式のリフィルでは 0.18 mm のものはあった。
(30穴)PLUS ポケットリフィール 100枚 87-700
フタ無しかつ薄~中厚さではこれで十分かなと思ったが、厚さは 0.07 mm で少し薄く感じる。
(30穴) LIHIT LAB REQUEST クリアーポケット厚口・エコノミーパック 20枚 G49070
厚さは 0.12 mm なので期待できるかも、と思ったが、これはちょっと厚すぎるかも。4穴や30穴あるならここまではいらない気もする。
(30穴) KOKUYO ラ-A31N 10枚入り
厚さは 0.08 mm. 30穴対応だが10枚で割高に思える。でもとりあえず買ってみた。厚さ的にはこれくらいがいいかなぁ…
(30穴) maruman 高品位クリアポケット エコノミーパック50 L460F
厚さ不明。かなり薄い。0.06 mm かも。思ったより薄い。しかし30穴ファイルで使うなら薄くてもいいだろ、という割り切りはありかもしれない。
エンボス加工はめくりやすいのだが、内側にも施されているため、中身も飛び出しやすいと思われる。
本体の問題ではないが、袋がピッタリしてないためか配達された時点で波打ちがあった。
サイドスロー
(30穴)KOKUYO クリアファイル替紙 サイドスロー ラ-70NY
そもそもフタ付きを試していたのは、中身がやや重いとき(封筒ごととか説明書とか)に、上からスルーっと落ちるのが嫌だったから。しかしフタ付きはマチ付きの封筒型が多いし枚数にしては高い。そこで横から入れるサイドスローというものの存在を知ったので試してみた。30穴だし、悪くはないのだが、若干入れづらい(特に大きな紙)のと、そもそも上から落ちそうなやつなら重めなのでもうちょっと厚くないと若干きびしいかな、という印象。ただ、今後使っていくと実はここが最適解だった、となる可能性もある。まだ結論は下していない。厚さは 0.06 mm と薄い。
サイドスローなので入口が広いのはいい。しかも中紙つきなので前と後ろに別のものを入れられる(これはふつうの中紙つきもそうだが)。とりあえず小さな説明書を前後に入れてみたが意外にいいかんじ。ただ10枚入りというのはコスト的にはやや厳しいか。
(30穴)KOKUYO 抜取ガード・脱落防止ポケット 20枚 ラ-SP880
厚さは 0.06 mm. 大失敗というか勘違いしていた。これ、「ファイリングする前に中身を入れる」という仕様だった。なるほど…かなりの特殊用途だ。